Concurrency
Lecture 11, Lecture 13
Slides
COMP3000-ConcurrencyA-annotated.pdf
Concurrency
- Threads share memory space, whereas processes do not.
- Threads can use shared memory to communicate with one another, while processes may have to use messaging.
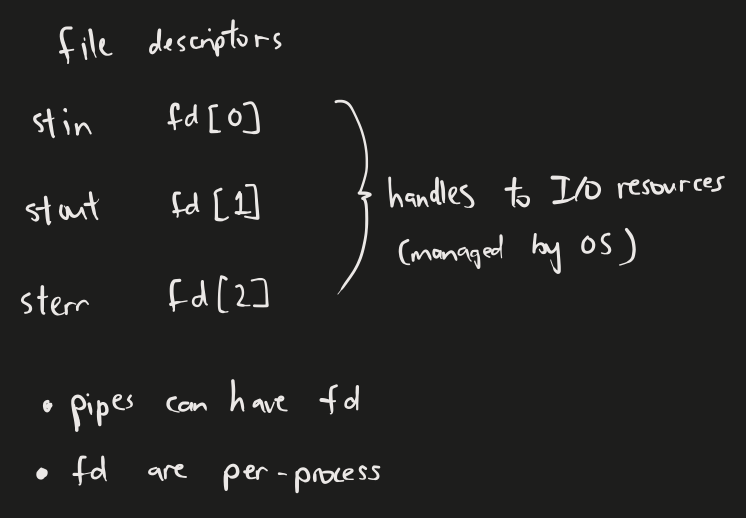
Pipes (messaging)
- Unnamed pipes (
pipe())- Backed by in-memory buffers – no inodes. ❌
- Limited scope: only accessible within the same process (✅ children processes, ❌ other processes), (✅
fork, ❌exec). - Limited lifespan: terminated with the starting process.
- Named pipes (
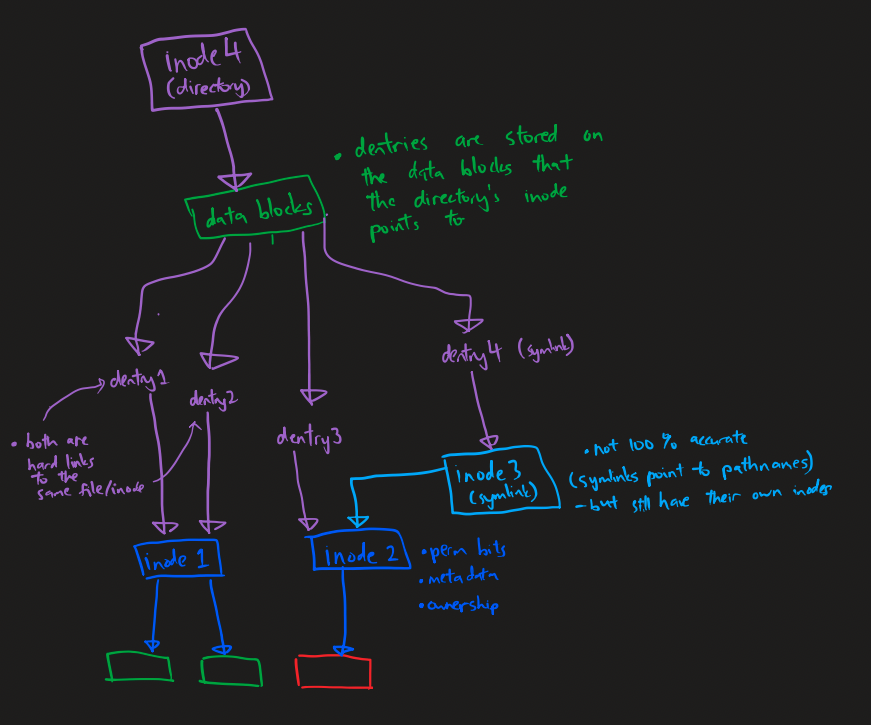
mkfifo()ormknod())- Backed by file systems – has inodes. ✅ (a "file" gets created)
- Accessible by multiple processes (via the file handle).
The 3 modes of mmap() (shared memory)
- Allocate memory: (tut2)
MAP_PRIVATE|MAP_ANONYMOUS– private to one process - Allocate shared memory: (tut6)
MAP_SHARED|MAP_ANONYMOUS- shared between processes - Map a file into memory: (tut5)
MAP_SHARED- shared between processes and backed by a file
mallocdoes not initially make syscalls, as it only has to allocate within the current process's address space.- However,
mallocis forced to use these syscalls to expand the process's address space when memory runs out:brk/sbrkfor small allocations andmmapfor large allocations. - The specific threshold can be viewed using
man malloc
Performance Overhead Tradeoffs
Messaging
- Example of messaging systems: pipes, signals, sockets, etc
- Easier to use
- Third-party OS abstraction mechanisms coordinate access to shared resources
- At the cost of performance
- Cost of moving data around (proportional to data size)
- Context switching: The OS layer has to constantly step in, causing extra switching of the execution context (state of CPU registers have to be loaded and unloaded to and from RAM when switching between running the kernel vs running the program). This is fixed and not proportional to the data size (saving and restoring the CPU state remain constant regardless of the data size).
Concurrency Issues
Operations that update shared resources lack atomicity because there are no per-purpose CPU instructions (each purpose requires multiple instructions to be achieved), opening up a chance for a third party to interject during the instruction sequence of a "purpose", leading to inconsistencies. (Manufacturers can only build in so many instructions into CPUs)
We solve this problem using mutual exclusion.
Semaphores (Mutexes and Conditional Variables)
Integer values that are decremented by sem_wait() and incremented by sem_post().
Processes wait when the value is < 0, and runs when the value is ≥ 0.
Modes:
- Mutex mode: set initial value to 1
- Thread A spins up. (calls
sem_wait(), semaphore goes from1to0) - Thread A starts its job. (because the sem value is
0, Thread A runs) - Thread B spins up. (calls
sem_wait(), semaphore goes from0to-1) - Thread B waits for Thread A to finish its job. (because the sem value is
-1, Thread B waits.) - Thread A finishes its job. (calls
sem_post(), semaphore goes from-1to0) - Thread B starts its job. (because the sem value is
0, Thread B runs)
- Thread A spins up. (calls
- Condition variable: set initial value to 0
- Thread A spins up. (calls
sem_wait(), semaphore goes from0to-1) - Thread A waits for "condition" to be satisfied. (because the sem value is
-1, Thread A waits.) - Some other thread finishes its job, and calls
sem_post(), satisfying the condition for Thread A to begin. - Thread A starts and completes its job. (because sem value is now
0)
- Thread A spins up. (calls
4 Necessary conditions for deadlocks
The four necessary conditions for deadlock, known as the Coffman conditions, are as follows:
Mutual Exclusion:
- At least one resource must be held in a non-sharable mode, meaning only one process can use the resource at any given time.
Hold and Wait:
- A process must hold at least one resource and be waiting to acquire additional resources that are currently held by other processes.
No Preemption:
- Resources cannot be forcibly taken away from processes that hold them. A process must voluntarily release any resources it holds before it can request additional resources.
Circular Wait:
- There must exist a circular chain of two or more processes, each of which is waiting for a resource held by the next process in the chain. When all four of these conditions are present simultaneously in a system, it can lead to a deadlock situation where no process can proceed because each is waiting for a resource that is held by another process in the deadlock. Deadlocks can cause system-wide resource starvation and can be challenging to detect and resolve.
Insufficient mutexes -> logic/data corruption, while overdoing mutexes -> deadlocks. The trick is to find a good middle ground.
Timeout is also a good way to deal with deadlocks (preemption).
Extra Notes